Hi, @felmue
Thank you for your advice!
It seems that I needed, I will try.
Hi, @felmue
Thank you for your advice!
It seems that I needed, I will try.
Hi M5 community,
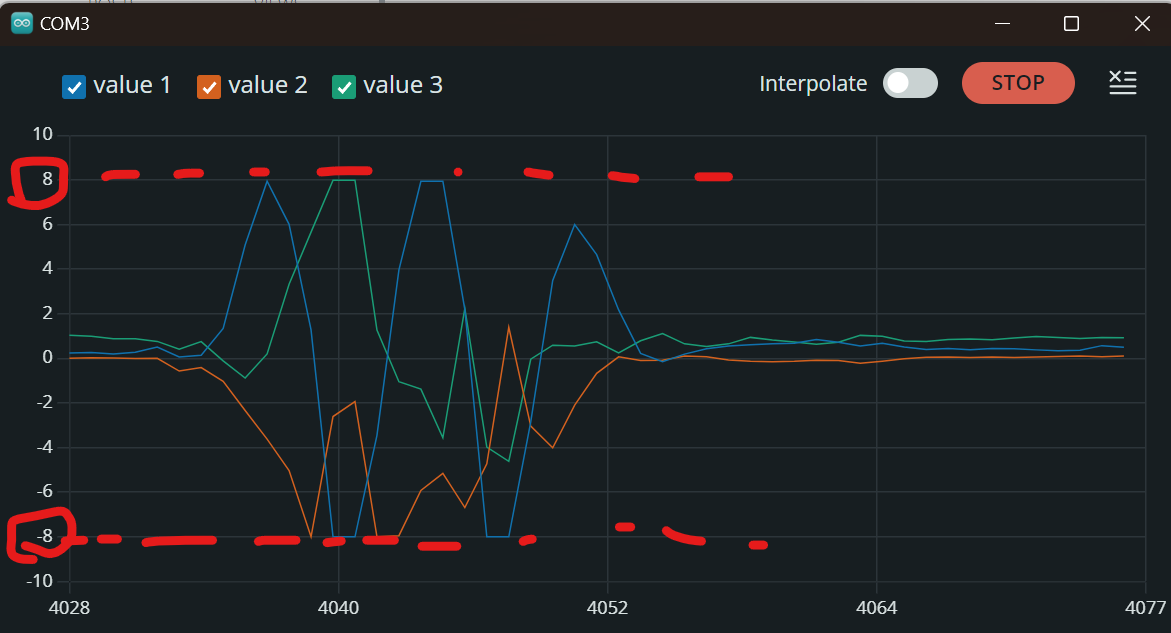
I'm using the M5StickC PLUS2 as an accelerometer in my project. It seems that the M5 detected accelerations over 8G, so I need to configure the MPU6886 to measure accelerations above 8G. However, I couldn't find an option to increase the max acceleration range in the IMU. I'm not very familiar with M5 or C++ programming, so if my explanation is unclear, please feel free to point it out.
Below is the actual measurement data, which is capped at +/-8G.
below is my project code, just in case.
#include "M5StickCPlus2.h"
#define SAMPLE_PERIOD 10 // サンプリング間隔(ミリ秒)
#define BUFFER_SIZE 100 // 1秒間に10回データを保持する(100ms * 10 = 1秒)
#define THRESHOLD 3 // 加速度の閾値 (例: 1.5G)
#define STOP_DELAY 1000 // 閾値を超えてから1秒で記録停止(1000ミリ秒)
// 状態管理のためのenum定義
enum State { INITIAL_SCREEN, MEASURING, STOPPED, RESULT_SCREEN };
State currentState = INITIAL_SCREEN; // 現在の状態を初期画面に設定
float accelX[BUFFER_SIZE]; // X軸加速度のバッファ
float accelY[BUFFER_SIZE]; // Y軸加速度のバッファ
float accelZ[BUFFER_SIZE]; // Z軸加速度のバッファ
int bufferIndex = 0; // バッファの現在のインデックス
bool thresholdExceeded = false; // 閾値が超えたかどうかを管理
unsigned long thresholdExceededTime = 0; // 閾値を超えた時刻を記録
float maxTotalAccel = 0; // 最大合成加速度を記録する変数
void setup() {
auto cfg = M5.config();
StickCP2.begin(cfg);
StickCP2.Display.setRotation(1);
StickCP2.Display.setTextColor(GREEN);
StickCP2.Display.setTextDatum(middle_center);
StickCP2.Display.setFont(&fonts::FreeSansBold9pt7b);
StickCP2.Display.setTextSize(2);
Serial.begin(115200);
showInitialScreen(); // 初期画面を表示
}
void loop(void) {
M5.update(); // ボタンの状態を更新
if (M5.BtnA.wasPressed()) { // G83ボタンが押されたら
handleButtonPress(); // ボタン押下に応じた処理を行う
}
// 測定中の処理
if (currentState == MEASURING) {
measureShock(); // 加速度を測定
}
delay(SAMPLE_PERIOD); // サンプリング間隔
}
// G83ボタンが押されたときの処理
void handleButtonPress() {
switch (currentState) {
case INITIAL_SCREEN:
currentState = MEASURING;
thresholdExceeded = false;
maxTotalAccel = 0; // 最大加速度をリセット
showMeasuringScreen();
break;
case MEASURING:
currentState = STOPPED;
showStoppedScreen();
break;
case STOPPED:
currentState = RESULT_SCREEN;
sendBufferData(); // シリアル送信を開始
showResultScreen();
break;
case RESULT_SCREEN:
currentState = INITIAL_SCREEN;
showInitialScreen();
break;
}
}
// 加速度測定を行う
void measureShock() {
auto imu_update = StickCP2.Imu.update();
if (imu_update) {
auto data = StickCP2.Imu.getImuData();
// リングバッファに加速度データを保存
accelX[bufferIndex] = data.accel.x;
accelY[bufferIndex] = data.accel.y;
accelZ[bufferIndex] = data.accel.z;
// バッファインデックスを更新(0~BUFFER_SIZE-1を循環)
bufferIndex = (bufferIndex + 1) % BUFFER_SIZE;
// 合成加速度を計算
float totalAccel = sqrt(data.accel.x * data.accel.x +
data.accel.y * data.accel.y +
data.accel.z * data.accel.z);
// 画面に加速度データを表示
StickCP2.Display.setCursor(0, 40);
StickCP2.Display.clear(); // 画面をクリア
StickCP2.Display.printf("Accel: %.2f G\n", totalAccel);
// 最大合成加速度を更新
if (totalAccel > maxTotalAccel) {
maxTotalAccel = totalAccel;
}
// 閾値を超えたかどうかを確認
if (totalAccel > THRESHOLD && !thresholdExceeded) {
thresholdExceeded = true;
thresholdExceededTime = millis(); // 閾値を超えた時刻を記録
Serial.println("Threshold exceeded! Starting countdown...");
}
// 閾値を超えてから1秒が経過したら測定を停止
if (thresholdExceeded && (millis() - thresholdExceededTime >= STOP_DELAY)) {
currentState = STOPPED;
showStoppedScreen(); // 測定終了画面を表示
}
}
}
// 初期画面を表示
void showInitialScreen() {
StickCP2.Display.clear();
StickCP2.Display.setCursor(0, 20);
StickCP2.Display.printf("Press G83 to Start\n");
int bat = StickCP2.Power.getBatteryLevel();
StickCP2.Display.printf("BAT:%d%" , bat);
}
// 測定中画面を表示
void showMeasuringScreen() {
StickCP2.Display.clear();
StickCP2.Display.setCursor(0, 20);
StickCP2.Display.printf("Measuring...");
}
// 測定停止画面を表示し、最大合成Gを表示する
void showStoppedScreen() {
StickCP2.Display.clear();
StickCP2.Display.setCursor(0, 20);
StickCP2.Display.printf("Measurement Stopped\n");
StickCP2.Display.printf("Max G: %.2f G\n", maxTotalAccel);
}
// 結果画面を表示
void showResultScreen() {
StickCP2.Display.clear();
StickCP2.Display.setCursor(0, 20);
StickCP2.Display.printf("Results Sent via Serial");
}
// バッファ内のデータをすべてシリアル通信で送信
void sendBufferData() {
int time = 10; // 開始時間(ミリ秒単位)
// CSV形式のヘッダーを送信
Serial.println("TIME,ACCEL_X,ACCEL_Y,ACCEL_Z");
// バッファ内のデータを送信
for (int i = 0; i < BUFFER_SIZE; i++) {
// データのインデックスがリングバッファの先頭から始まるように調整
int index = (bufferIndex + i) % BUFFER_SIZE;
//Serial.printf("%d,%0.2f,%0.2f,%0.2f\r\n", time, accelX[index], accelY[index], accelZ[index]);
Serial.printf("%0.2f,%0.2f,%0.2f\r\n", accelX[index], accelY[index], accelZ[index]);
// 10ミリ秒ごとに時間を更新
time += 10;
}
// データの送信終了を示すメッセージ
Serial.println("---- END_OF_DATA ----");
}