I conducted additional functionality checks.
- Using angle command → Worked.
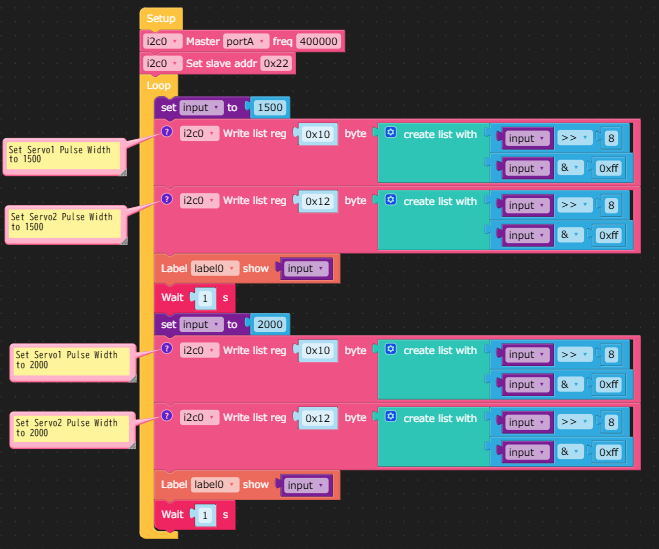
- Controlled the pulse width of Servo2 via I2C → Worked.
The functionality check was using the Servo Kit 360.
It is my assumption that there may be an issue with the "set servo pulse to" block.
Specifically, the register addresses for inputting the pulse width (SERVO1_PULSE_ADDR: 0x10, SERVO2_PULSE_ADDR: 0x12) might not be correctly specified.
I hope someone from the development team will review this and make the necessary corrections.