Dear M5Stack Community,
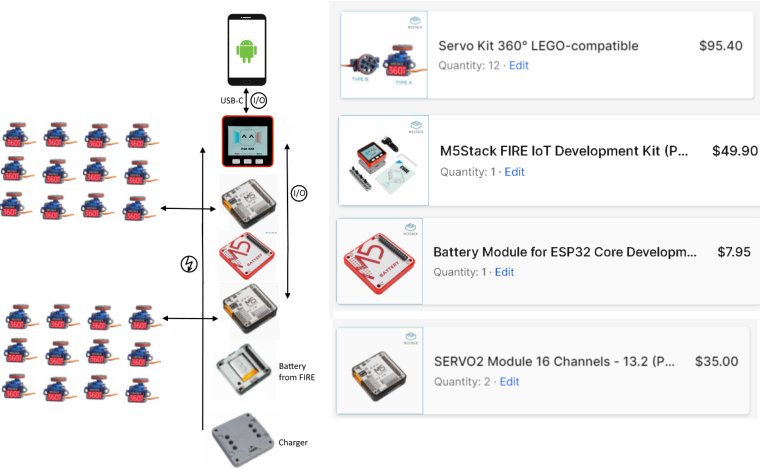
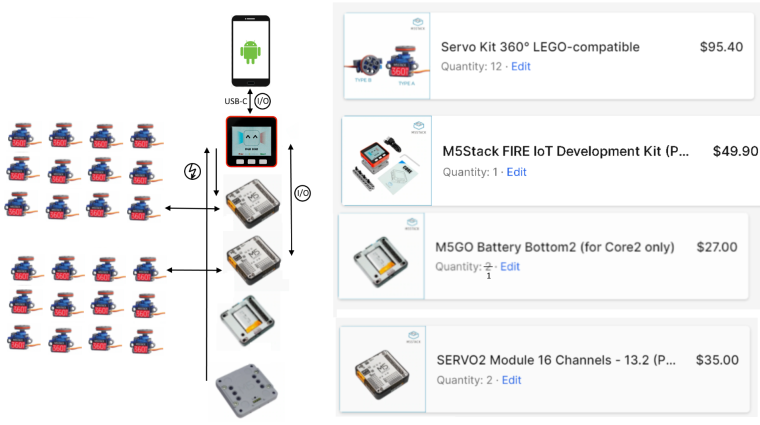
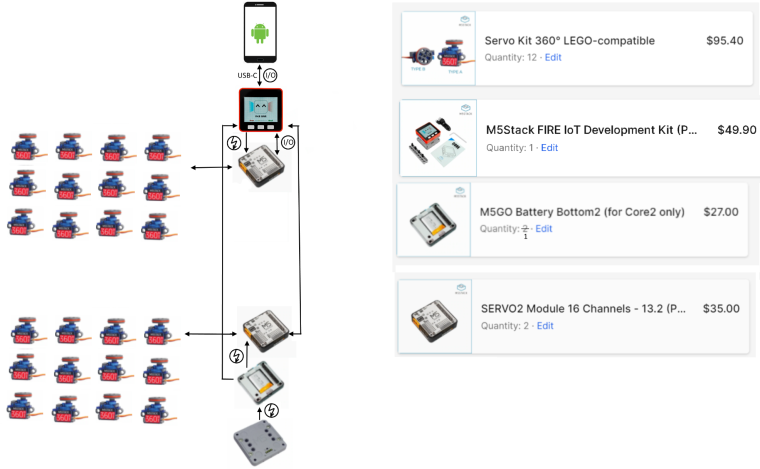
on the way of making a robot i am currently at the point of diving into hardware. The actual simulation and servo-controls runs on mobile phone (Android, utilizing the GPU).
So i like to send the controls (angular-velocities) via USB-C into a micro-controller at which the servos and batteries are attached to. The micro-controller will apply these to the servos, as well as collecting and reporting-back the servo angular-positions.
Quite optimistic from the software-side (C++) i am surely lost in hardware-land and hope to get this step by step.
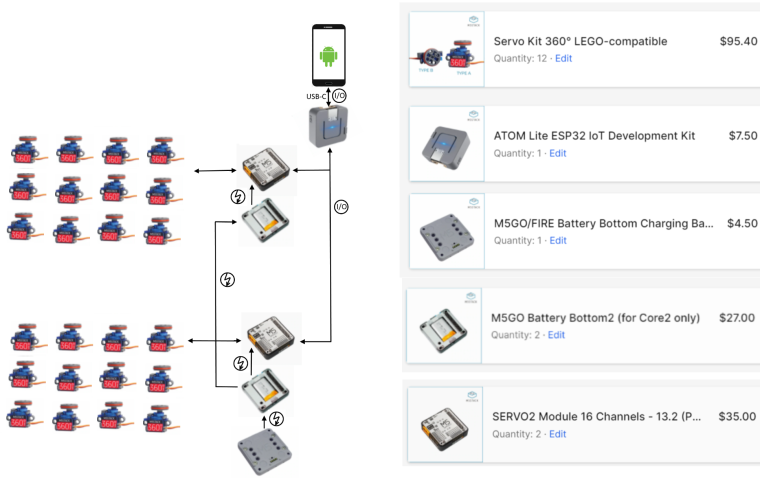
To use 24 servos in total is it possible to use an
ATOM Lite ESP32
and control with it TWO separate
SERVO2-Modules
with each a
Battery-Module
and each
12 Servos (360°)
It would be great to charge both Battery-Modules by attaching a single magnetic Charging-Base at one.
(In the future i like to add cameras to the setup and send the images via USB-C to the phone as well. Maybe the ATOM wont have enough power to pipe all this data so it may need CORE anyway?)
I'd love to build the frame for a prototype with LEGO so all this M5Stack hardware appears so perfect. Can you folks please hint me if the setup above makes kinda sense or point me into some proper direction?
Thanks and happy building!