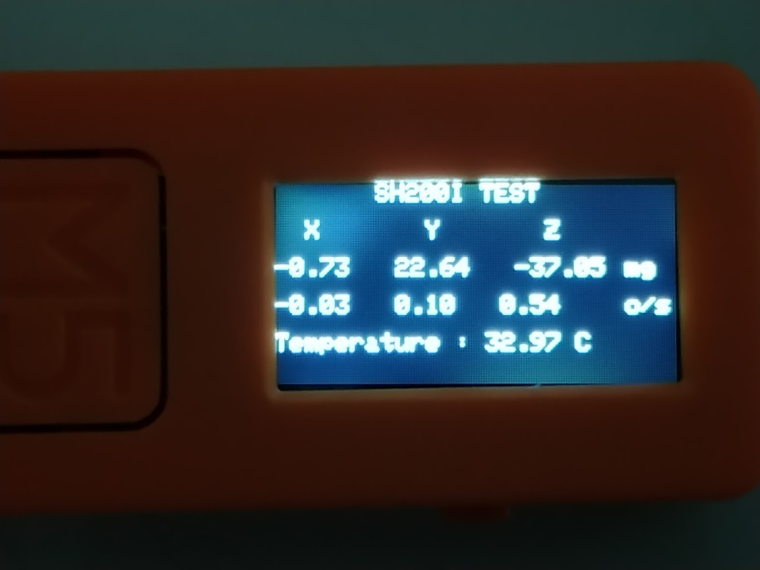
SH200I test strange results
-
Why there are always gyro results the same in any static position of m5stick?
-
@vvs551 Hi, thank you for your question.
It is normal.
The gyro sensor detects angular velocity. so if M5StickC is not rotating, gyro value also not change. -
@salty_good why such values? What does it mean?
-
@vvs551 sorry, I didn't understand your mean.
You mean M5StickC need to be (x, y, z) = (0, 0, 0) in any static position?
Because it's no calibration in the test code now... -
@salty_good Thank you! I understand
I have not met before the calibration requirements for i2c digital sensors)
Sorry -
@vvs551 so sorry...
We will provide calibrated version code in the future!! -
@salty_good Could you propose any idea how to calibrate data and get real time angle monitoring sketch?
Because there is a terrible fluctuations from the meaning value in the time.
I could not get something near zero in static position if I do accumulative addition like here:
gyroX += ((float)gX * M5.IMU.gRes - gyroX0);
Where gX - int16_t current gyro value, gyroX0 - float calibration value with gRes, and gyroX - float accumulative angle value -
@salty_good Is there a calibration yet? Any update?
Thanks
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login