StickC Plus + PaHUB + 3 Ultrasonic I2C units
-
This post is deleted! -
Hi @robot_alf, Try the details in this thread https://community.m5stack.com/topic/1104/pahub-access-cracked. Post back here if it works out for you (I was thinking about something similar myself).
-
I would assume from a new UIFlow window (started as StickC Plus and connected):
Add/+ Pa.Hub unit (Port "A")
Add/+ 1st ultrasonic unit (Port "PAHUB", PAHUB "PAHUB0")
NB Dropdown will expand for PaHUB tree after Port "PAHUB"
Add/+ 2nd ultrasonic unit (Port "PAHUB", PAHUB "PAHUB1")
Add/+ 3rd ultrasonic unit (Port "PAHUB", PAHUB "PAHUB2")
Then from the blocks selection drag an ultrasonic read distance as per the read device example then use dropdown to select ultrasonic_0, ultrasonic_1, ultrasonic_2, etc. -
@gavin67890 nope (
-
@gavin67890 yes, I did the same and checked a few times. Not working.
>>> gc.collect) >>> paste mode; Ctrl-C to cancel, Ctrl-D to finish === from m5stack import * === from m5ui import * === from uiflow import * === import unit === setScreenColor(0x111111) === pahub_0 = unit.get(unit.PAHUB, unit.PORTA) === Ultrasonic_0 = unit.get(unit.ULTRASONIC, unit.PAHUB0) === === Traceback (most recent call last): File "<stdin>", line 6, in <module> File "unit.py", line 187, in get File "<string>", line 1, in <module> File "units/_pahub.py", line 7, in __init__ File "i2c_bus.py", line 32, in get KeyboardInterrupt: >>> -
Core2 working correct with PaHub but StickC Plus not.
I've tried to use UIFlow 2.0 (Alpha-24), but can't run even just created empty project on StickC Plus:
Connected to Serial Port! I (414565) UIFLOW_UTILITY: Read U32 Key: AUTODETECT Value: 4 I (445565) UIFLOW_UTILITY: Read U32 Key: AUTODE MicroPython v1.20.0 on 2023-08-31; M5STACK with ESP32 Type "help()" for more information. >>> >>> >>> import gc MemoryError: memory allocation failed, allocating 512 bytes >>> gc.collect() MemoryError: memory allocation failed, allocating 512 bytes >>> paste mode; Ctrl-C to cancel, Ctrl-D to finish === import os, sys, io === import M5 === from M5 import * === def setup(): === M5.begin() === def loop(): === M5.update() === if __name__ == '__main__': === try: === setup() === while True: === loop() === except (Exception, KeyboardInterrupt) as e: === try: === from utility import print_error_msg === print_error_msg(e) === except ImportError: === print("please update to latest firmware") === === === MemoryError: memory allocation failed, allocating 512 bytes -
@robot_alf
A couple of thoughts: https://www.youtube.com/watch?v=nMsCwqCE5c8 shows similar steps (likewise working from a Core-based device), but I noticed he doesn't Add/+ the PaHUB unit, although it is there to select from as a port (however this video does add https://www.youtube.com/watch?v=HBijjbXDaoo). This might just be an oversight, but I tried it in UIFlow and it does appear in the port dropdown without Add/+.The difference is the one pahub_0 line, you could try without. Also, I did note in the comments of the video above others who experienced problems using M5StickC & PaHUB :(.
without add/+
setScreenColor(0x111111)
Ultrasonic_0 = unit.get(unit. ULTRASONIC, unit.PAHUB0)with add/+
setScreenColor(0x111111)
Ultrasonic_0 = unit.get(unit. ULTRASONIC, unit.PAHUB0)
pahub_0 = unit.get(unit.PAHUB, unit. PORTA)2nd thought, I'm assuming the 20cm cables included in the Ultrasonic sensors are in use and approx. the same StickC Plus to PaHub. No bad pins, poor connections, excessive length, etc. Again thinking power, I was wondering if you could connect the Core2 to one of the 6 inputs, if possible 5V/GND only, to check/confirm sufficient supply on VCC. 3x Ultrasonic should be well within the 500mA from StickC Plus but just in case. Thinking along this line, do you have any other sensors to try (simple switches or similar)?
Looping @m5stack , I think we have a common issue, so any assistance gratefully received please.
Alt ref: https://community.m5stack.com/topic/1508/pahub-with-m5stick -
I checked everything several times. Everything works fine for me with Core2, but it doesn’t work with StickC Plus. Moreover, I see the ultrasonic sensor connected through the PaHub if I select PortA for the sensor. And the same time the sensor not found when PAHUB0 port is selected.
The problem is that we wanted to make a little size machine with 3 ultrasonic sensors and two servo360 for wheels. Core2 requires external power for the servo. StickC Plus has a servo module with a built-in battery that suitable for mobility devices with small dimensions but we can't use ultrasonic devices.
Ok, I still trying to find a solution how to connect 3 ultrasonic sensors for the StickC Plus.
To check my case and got the same error is very easy. Just connect ultrasonic sensor through pahub, add the hub and the sensor in UIFlow to the StickC Plus controller and run the project with empty code. -
@robot_alf, An alternate option for you, https://docs.m5stack.com/en/module/goplus2 (I have it, and it works well). This would drive the servos (it has a small battery), or I use external 6x AA pack and DC barrel jack connector.
Then either PaHUB I2C to sensors or it has 3x GPIO ports for alternate ultrasonic modules with GPIO ports (black not red), but that would, unfortunately, mean a sensor rebuy.
-
@robot_alf, It would mean a switch to Arduino, but maybe this would help with fault finding (example for PaHub, which happens to use StickC) https://github.com/m5stack/M5StickC/blob/master/examples/Unit/PaHUB/PaHUB.ino
I'm thinking scan down through the tree to see where it's connected. -
Hello guys
the following worked for me (M5StickCPlus fw 1.12.3, PaHub, 2x ultrasonic unit *)).
*) I don't actually have an ultrasonic unit - I simulated two of them with two ESP32C3 acting as I2C slaves on address 0x57.
Note: I did not add PaHub as unit. Just the two Ultrasonic units.
from m5stack import * from m5ui import * from uiflow import * import unit setScreenColor(0x111111) Ultrasonic_0 = unit.get(unit.ULTRASONIC, unit.PAHUB0) Ultrasonic_1 = unit.get(unit.ULTRASONIC, unit.PAHUB1) label0 = M5TextBox(37, 38, "label0", lcd.FONT_Default, 0xFFFFFF, rotate=0) label1 = M5TextBox(38, 115, "label1", lcd.FONT_Default, 0xFFFFFF, rotate=0) label0.setText(str(Ultrasonic_0.distance)) label1.setText(str(Ultrasonic_1.distance))Edit: I just thrown in four additional I2C units (RFID, EXT.IO2, Gesture and 4 Relay), all connected to the PaHub and everything still works fine for me.
Thanks
FelixGPIO translation table M5Stack / M5Core2
Information about various M5Stack products.
Examples -
@felmue Hi Felix, where can I find more information on I2C slaves?
I could never get Master/Slave to work on ESP32.
A snippet of sample code would be REALY(!) nice.
Thanks. -Terry -
@felmue Out of curiosity, could you try adding PaHub as a unit (Port A) and see if everything still works correctly?
-
@felmue looks like the same code that return "ultrasonic not found" at start, but I will check it.
-
I have made a simple test for Arduino and it works. It show that hardware part is working correct need just fix the problem in the code for UIFlow.
#include <M5StickCPlus.h> #include <Unit_Sonic.h> #include "ClosedCube_TCA9548A.h" #define PaHub_I2C_ADDRESS 0x70 ClosedCube::Wired::TCA9548A tca9548a; SONIC_I2C sensor; void setup() { M5.begin(); tca9548a.address(PaHub_I2C_ADDRESS); sensor.begin(); M5.Lcd.setTextFont(2); M5.Lcd.setTextColor(YELLOW, TFT_BLACK); M5.Lcd.println(("PaHUB Example")); M5.Lcd.setTextColor(TFT_WHITE, TFT_BLACK); } void loop() { static float newvalue = 0; for (uint8_t channel = 0; channel < 6; channel++) { tca9548a.selectChannel(channel); M5.Lcd.print(channel); M5.Lcd.print(" = "); newvalue = sensor.getDistance(); if ((newvalue < 4000) && (newvalue > 20)) { M5.Lcd.printf("%.2fmm", newvalue); } else { M5.Lcd.print("ERR"); } M5.Lcd.print("\n"); } delay(20); M5.Lcd.fillScreen(BLACK); M5.Lcd.setCursor(0,0); } -
Hello guys
@gavin67890 : yes it still works when I add PaHub as unit on Port A.
@robot_alf : have you tried something similar in UiFlow/Micropython? E.g. only adding one Ultrasontic unit and then manually select the PaHub port/channel?
Thanks
Felix -
@robot_alf Have you tried Download rather than just Run from UIFlow? I had it on another project that refused to Run, but worked OK from Download.
Other than that, perhaps just recheck all again from the top, right StickC model (original or Plus), right units for PaHUB and Ultrasonic, etc. Did you want to add some screenshots from UIFlow, Blocky, Python, etc. Maybe with a few pairs of eyes we can spot something (remember to hide your API Key).
-
@gavin67890 Download not working. I think it is the same like run app just the controller switched to the "app" mode instead of "internet" mode.
-
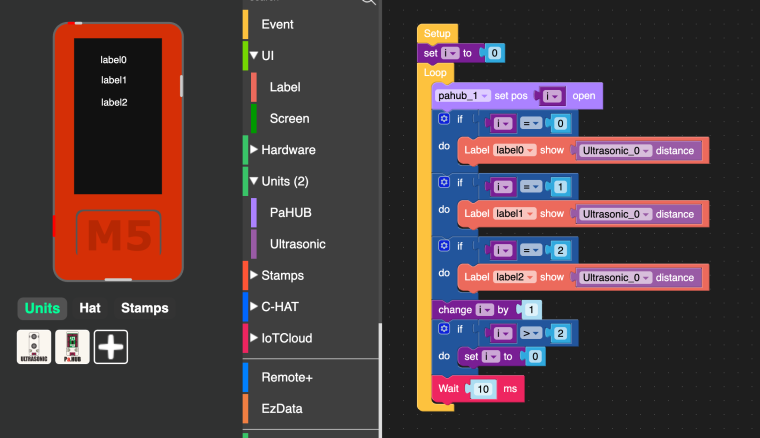
This is crazy but this code working with 3 sensors )
The pahub and ultrasonic was selected to PortA. And sometimes I see distance from incorrect sensor. I think again that hardware part is working, but code for StickC Plus controllers have some bugs.
M5Stack engineers, could you please send me python libraries for pahub and ultrasonic? Maybe I can help to investigate the problem. I don't want to spend time for reverse engineering them from bin-file of UIFlow firmware ) -
This code also working but need to connect sensors to 1,2,3 ports of pahub, not to 0,1,2
#include <M5StickCPlus.h> #include <Unit_Sonic.h> #include "ClosedCube_TCA9548A.h" #define PaHub_I2C_ADDRESS 0x70 ClosedCube::Wired::TCA9548A tca9548a; SONIC_I2C sensor; void setup() { M5.begin(); tca9548a.address(PaHub_I2C_ADDRESS); sensor.begin(); M5.Lcd.setTextFont(2); } void loop() { static float newvalue = 0; for (uint8_t channel = 0; channel < 3; channel++) { tca9548a.selectChannel(channel); M5.Lcd.printf("%i = ", channel); newvalue = sensor.getDistance(); if ((newvalue < 4000) && (newvalue > 20)) { M5.Lcd.printf("%.2fmm ", newvalue); } else { M5.Lcd.print("ERR "); } M5.Lcd.print("\n"); } delay(20); M5.Lcd.setCursor(0,0); }
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login