L
Offline
Latest posts made by LishengKKK
-
RE: M5stack core2 control 12 channel Servo module
Hi, @felmue
Meanwhile, I got a reply from the 'support@m5stack.com'
they provided another solution.....
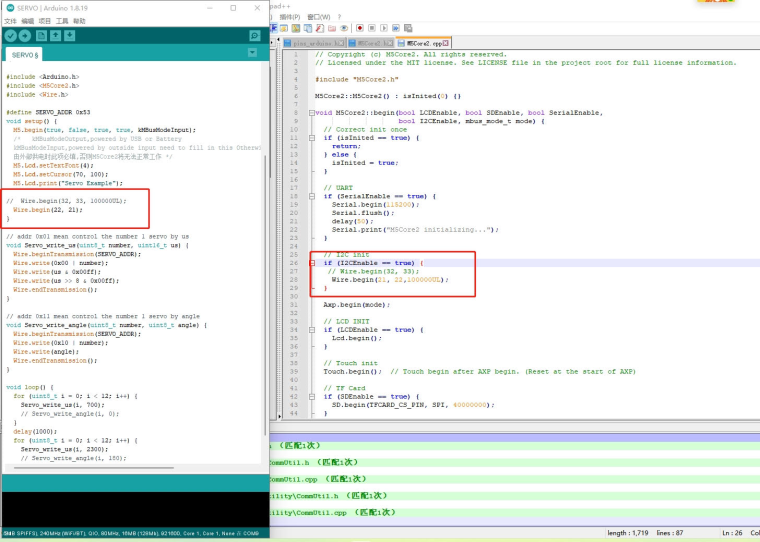
in the M5stack core2 library (~/Arduino/libraries/M5Core2/src),
in the class 'void M5Core2::begin'
change
' // I2C init
if (I2CEnable == true) {
Wire.begin(32, 33);
}'to
' // I2C init
if (I2CEnable == true) {
Wire.begin(21, 22, 100000UL);
}'
then in the arduino code:
add 'Wire.begin(22, 21);'then the core2 and 12-channel servo will work properly.
but the weird thing is that they still work even when I delete the line 'Wire.begin(21,22);' meaning delete all the 'Wire.begin(..,..);' in the void setup() .
this is a bit funny.
-
RE: M5stack core2 control 12 channel Servo module
@felmue
thank you very much, follow your tips, now the M5stack cores can work with the 12-channel servo. -
RE: M5stack core2 control 12 channel Servo module
thanks a lot, but I still can not fix the problem, now I change to use another controller instead of core2.
-
RE: M5stack core2 control 12 channel Servo module
@felmue thank you.
I changed the code as you suggested, but the servo still doesn't work.
could you please share the code which works well on your side?
thanks again.
-
M5stack core2 control 12 channel Servo module
Hi,
I'm using M5stack core2 and 12 channel servo module (https://docs.m5stack.com/en/module/servo) to control servo motors.
I plug the servo module onto the m5stack core2 and use the code (https://github.com/m5stack/M5Core2/blob/master/examples/Module/SERVO/SERVO.ino)
but the servo motor, does not work properly, the motor works fine with other drivers.
I guess there might be some problem with the code.
could you please help to check if the M5stack core2 could work with the Servo module?
thank you.
-
M5Stack core2 communicate with ROS
Hi,
I am trying to use M4Stack core2 to communicate with the ROS,
to be detailed, core2 sends and receives data through serial port with ROS.but it seems to fail to 'shake hand' with ROS, errors are like
'
~/catkin_ws$ rosrun rosserial_python serial_node.py /dev/ttyACM0
[INFO] [1652882151.845943]: ROS Serial Python Node
[INFO] [1652882151.860072]: Connecting to /dev/ttyACM0 at 57600 baud
[INFO] [1652882153.969811]: Requesting topics...
[ERROR] [1652882168.974206]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[INFO] [1652882168.978350]: Requesting topics...'
anyone has clues on this, eny examples or demos on this?thank you in advance.
-
RE: Pahub error with CORE2 with GoPlus2
@arno Hi, Arno, thanks for the reply, but the 'cut' here means physically cut the wiring on the PCB board?
is it fine if we physically cut it on the board (there might a big chance to damage the board)? -
control servomotors with Goplus2 and M5Stack core2
Hi,
I am trying to control servomotors with Goplus2 and M5stack Core2. the same time,I will also need the IIC port on M5Stack to connect to a Joystick.I found out that Goplus3 is not specitic for M5Stack Core2 and the IIC port will no function when core2 is connected to Goplus2.
But I also found a solution from here (https://www.google.com/url?q=https://community.m5stack.com/topic/2868/pahub-error-with-core2-with-goplus2/2&sa=D&source=docs&ust=1649764755845720&usg=AOvVaw3dyq5wcFYNqTeWGf2TsYMF) to turn off the IR_OUT when using the Goplus2 and external IIC.
but My question is :
1, how to turn off the IR_OUT and
2, how to control the servomotors with Goplus2.thank you inavance!
-
RE: Pahub error with CORE2 with GoPlus2
@arno Hi Arno, could you share the code of turning off the IR_OUT?