Don't know what to use
-
@ajb2k3 hello,
At the moment I have a h-driver for Atom
I was able to control the 12v DC motor by using this module; but I think I will not be able to use the Atom for communication between the scales kit+RFID emitter (because I only have 1x grove port on it)I also have a M5 core and a DC motor module; but don't know how to wire the DC motor on it
I'm still learning so I don't know if these information are sufficient. If not; I will be happy to provide more details about my setup and the hardware I have got. Feel free to ask.
Thank you very much for your help 🙂
Best regards -
Hi guys,
Somebody able to help on this? 🙂 -
Sorry forgot about this.
You should be able you use the Scales and the RFID units on the same port of the atom if you connected a PaHub between them as they both use I2C to communicate and the PaHub is an I2C port expander.
Have you tried testing with the RFID or the scales kit connected ? -
@ajb2k3 hello,
That's a good news if I could use only the Atom rather than a M5 core; because I don't need any display and I prefer to keep things minimalist 🙂I unfortunately did a mistake about my available hardware: I don't own a Pahub but a 1 to 3 HUB Expansion Unit
I think it won't work.
I will order a Pahub and post any progress here.
Thank you for your great help !As I'm going to order things at M5stack, I also would like to order the required parts for controlling a 12v DC motor with a M5 Core
What kind of module/extension should I choose for this ? GoPlus2 maybe?
Thank you for your feedback
Best regards
-
You said you are controlling a motor with the ATOM already, what motor and atom are you using. Please share photos of your setup so far.
-
@ajb2k3 here is a photo of my setup with:
- Atom + h-driver
- 12v DC motor
- 12v power supply
What kind of module/extension should I choose for this ? GoPlus2 maybe? --> this question was for another future protect with a 12v DC motor I want to control with a M5 Core. This is just for information and is not related to the subject of this topic 😉
Best regards
-
If its working as is then all you need is the Pahub to connect your two sensors and then program it all up.
-
Hi @ajb2k3 thank you for your feedback.
I will order a Pahub and report any progress here.
Best regards -
One last question please
I will need to get the level of food available inside the food tank
For this, I plan to use a Ultrasonic Distance Unit I2C (RCWL-9620)
I already have itIs it the correct way to achieve this ? (There are a lot of sensors for liquid level; bit not sure about what to use for solid things)
The Ultrasonic Distance Unit I2C (RCWL-9620) is communicating with I2C. Does it mean I can connect it with everything by using the Pahub I'm about to order ?
Thank you very much for your feedback
Best regards -
@jerome83136 you work great!
-
@ajb2k3 if it means this setup will work, then I'm happy 🙂
-
Unless you need to control the speed and direction, you can control a non-stepper motor with just a transistor and diode, for one speed, on-off type operation.
Also bear in mind that the range of the RFID 2 Unit (WS1850S) is only about 20mm. The UHF RFID Unit (JRD-4035) had a longer range, but is expensive. There may be longer range 13.56 Mhz sensors available from other vendors.
-
hi @wsanders
If I can drive the motor with tha Atom and H-driver; that's fine for me.
I plan to extend it with a PaHub in order to get additional grove ports and connect the Scales kit + RFID2 reader.
But I wonder if it will work because I'm not sure M5 Scales kit is using I2CI choosed the RFID2 reader because of its price (as you said: the UHF reader is quite expensive)
I see 2 options to solve the range issue:
- Using 3 RFID2 readers on each side of my object (see red arrows on enclosed picture)
- Try to extend the RFID2 range with a custom antenna with magnetic wire, around the food dispenser
- Use this cheap 125KHz RFID reader and make a custom antenna with magnetic wire, around the food dispenser. But can I make it talk to M5 stuff ? (it uses a grove connection and output format is Uart and Wiegand)
Do you think it could work ?
Thank you for your feedbackBest regards
-
The RFID Unit is a I2C device. The scale unit isn't. Is uses a special protocol (using HX711 library). It will not work with the PbHub. As I mentioned in another community thread, you can get a I2C scale kit from DfRobot : https://wiki.dfrobot.com/HX711_Weight_Sensor_Kit_SKU_KIT0176.
DfRobot doesn't use the groove standard fot their wiring: VCC and GND are switched as well as the SDA and SCL lines.
Wish List for M5Stack: Make the scale kit I2C compatible by using the STM8/32 or AVR328 as they are using in the PbHub or 4Relay Unit making the compatible for the "universal" I2C bus. -
Hello all,
Some news here.
I ordered an RFID reader and am still waiting for it to be delivered. So, I will share some news about this part later.
For the 12v DC motor control; I have some troubles.
I ordered a GoPlus2; but it tidn't feet because even if it has a 12v input; it can't deliver 12v output to my DC motor.So I switched to another option: using a 5v relay to power the 12v DC motor.
The problem I have is: how to use the M5 Core to control the 5v relay ?
I tried this example but I'm just unable to understand what are the pins used by this guy on the M5 core ?
The guy uses the pins 2, 27, 32 and 13; but where are these pins on the M5 core basic I own ?
Do I have to remove the M5 core bottom (received with the M5 core basic) ?I don't really understad the pin map of the M5 core basic. Is there some reference somewhere for wiring ? And is there a description about the colours used on the M5 core basic product sheet pinmap section ?
Or some example telling "if you are using digitalWrite(2, 0) on UIFlow; you have to use this specific pin on the core"Thank you for your feedback
Best regards
-
The pinouts are located on the M5Stack product page by following the documents link https://docs.m5stack.com/en/core/basic_v2.6?ref=pfpqkvphmgr
The exact pins and location depend on the specific model of core but he is using the Core2's MBus which is the big internal connector. -
Hello,
Thank you for your feedback.
As I'm quite new on this kind of stuff (using pins to interact with an external component); I need some tips :)
When I do this on UIFlow:
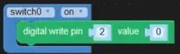
I understand it activates the pin n°2 (LOW), when the "switch0" is activated. Am I right ?
How can I identify the pin n°2 on my M5 Core basic with a base core bottom ?
I think I need some documentation/tutorial to understand the correspondance between the pins used into UIFlow and the the pinmap on M5 Core Basic. Can I find this somewhere ?
Thank you for your help
Best regards
-
Hi,
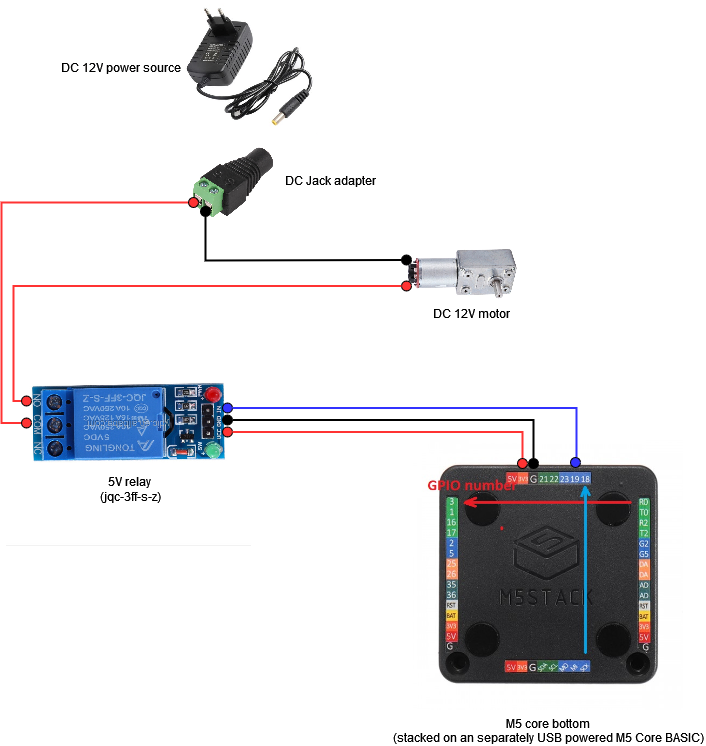
I finally got the relay working with M5 Core Basic !
I think my mistake was to power the relay with 5v rather than 3.3vHere is my wiring:
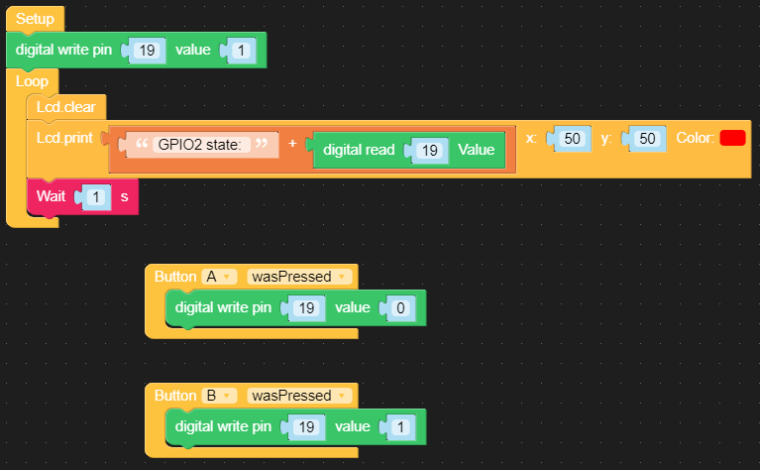
And here is the example UIFlow that works for me:
Now I need to find a way to power the M5 Core Basic by using a DC 12V --> USB 5V connector and connect it to the DC 12V power supply I already use.
Next step will be the hardest: understanding how PaHub works to interconnect the M5 Core Basic with:
- RFID reader
- M5 Scales kit
- M5 Ultrasonic Distance Unit
I will report progress here
Thank you again for your help
Best regards
-
Hi all,
Another report here.
Almost everything is ready.
I'm quite sure the RFID2 reader won't do the job because of its short reading range; let's try and improve if required.
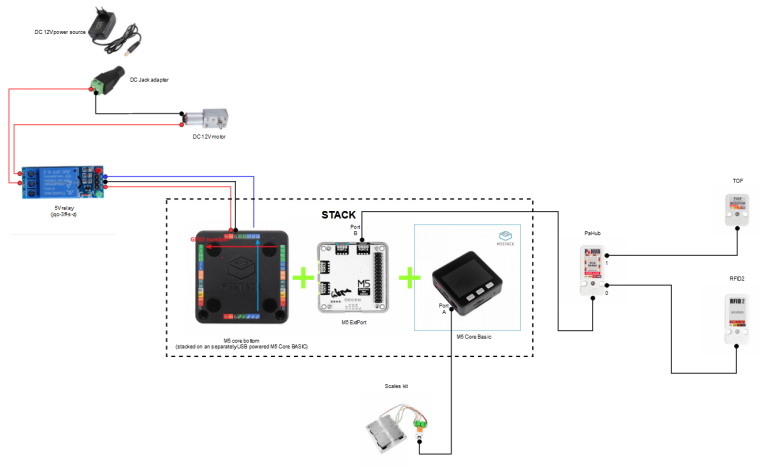
I will certainly have to give this reader a try. (already ordered)1 question I had while testing: TOF and RFID2 seems to need Ports A or E. But Port E never worked (the unit is seen as "not connected" by the Core); forcing me to use a PaHub which is a pity because I have plenty of available ports with the ExtPort extension.
Someone able to help me understanding why ? (If I could use port E; I could completely remove the PaHub)Here is the current setup:
Last thing to do to complete the prototype: get a 12v --> 5V USB connector in order to power the M5 Core + 12v DC motor with a single source.
Here is a simple UIFlow to check every component works correctly:
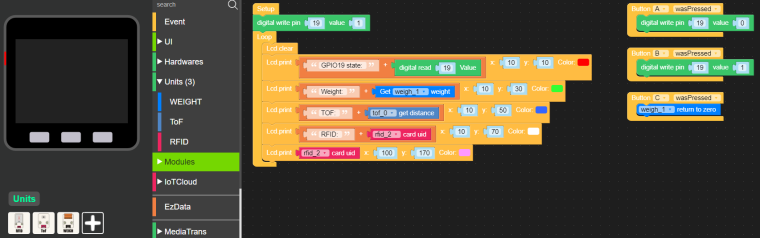
Best regards
-
Hello all,
Last part done (single power supply for M5 core + DC motor)
I was also able to remove the PaHub by using the ExtPort (Port D). I had to change the dip switch value to:- Port D-1[2] = ON (to use GPIO22)
- Port D-2[2] = ON (to use GPIO21)
I then had to change the TOF module's port config in UIFlow to use the Port D:
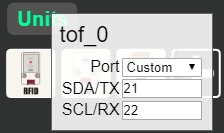
Final diagram:
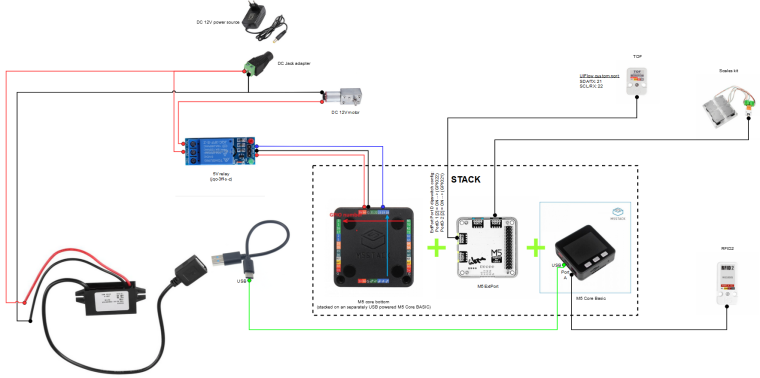
NB: DC(12v) to USB(5v) converter link
Now let's get physcal parts printed and test it !
Best regards
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login